China divulga os primeiros sons de Marte capturados pelo robô Zhurong; ouça

A istração Espacial Nacional da China divulgou um vídeo com os primeiros sons de Marte registrados pelo robô Zhurong, que está desde maio no planeta vermelho e "faz companhia" para o Perseverance, sonda da Nasa. Além dos sons, o robô chinês também enviou alguns vídeos, captados por uma câmera removível, que o mostram se locomovendo por lá.
O Zhurong está explorando uma área da superfície de Marte conhecida como Utopia Planitia. "O propósito do dispositivo de gravação é capturar os sons do vento em Marte. Nós realmente queremos ouvir como os ventos soam em um planeta diferente da Terra", disse à TV estatal CCVT o designer-chefe do sistema Tianwen-1, Jia Yang, segundo o site "Space".

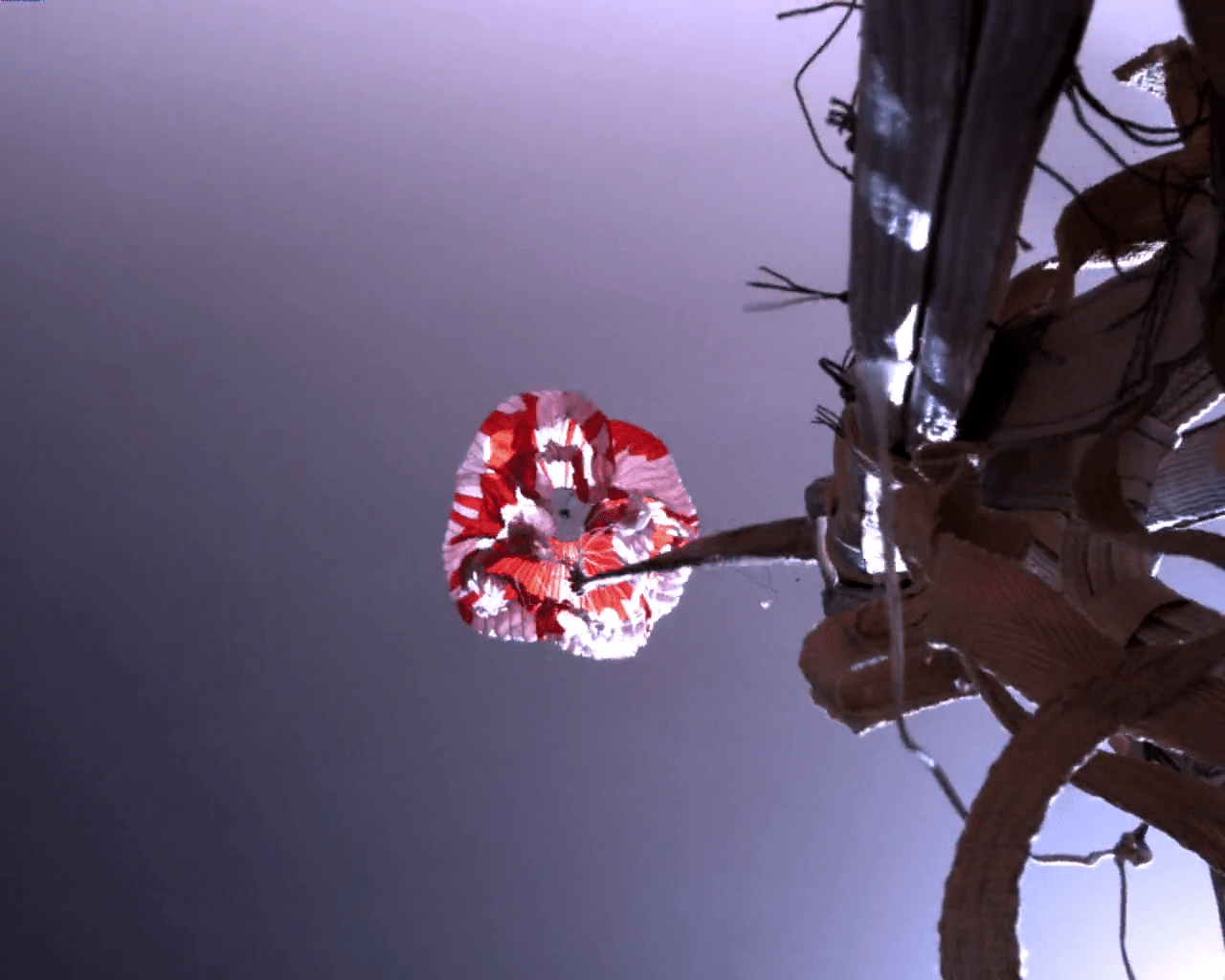
Além dos sons do planeta vermelho, o vídeo enviado mostra o Zhurong dirigindo sobre a superfície de Marte. Também é possível ver o paraquedas da sonda durante o pouso.
Além disso, dá para observar a vista da superfície de Marte conforme o robô chega ao planeta.
O vice-comandante do primeiro programa de exploração de Marte da China, Liu Jhizong afirmou em entrevista à CCTV que "com os arquivos [de vídeo, imagem e áudio] que lançamos desta vez, incluindo os sons gravados quando nosso rover de Marte deixou o módulo de pouso, podemos realizar análises aprofundadas do ambiente e da condição de Marte, por exemplo, a densidade da atmosfera".

Zhurong em Marte
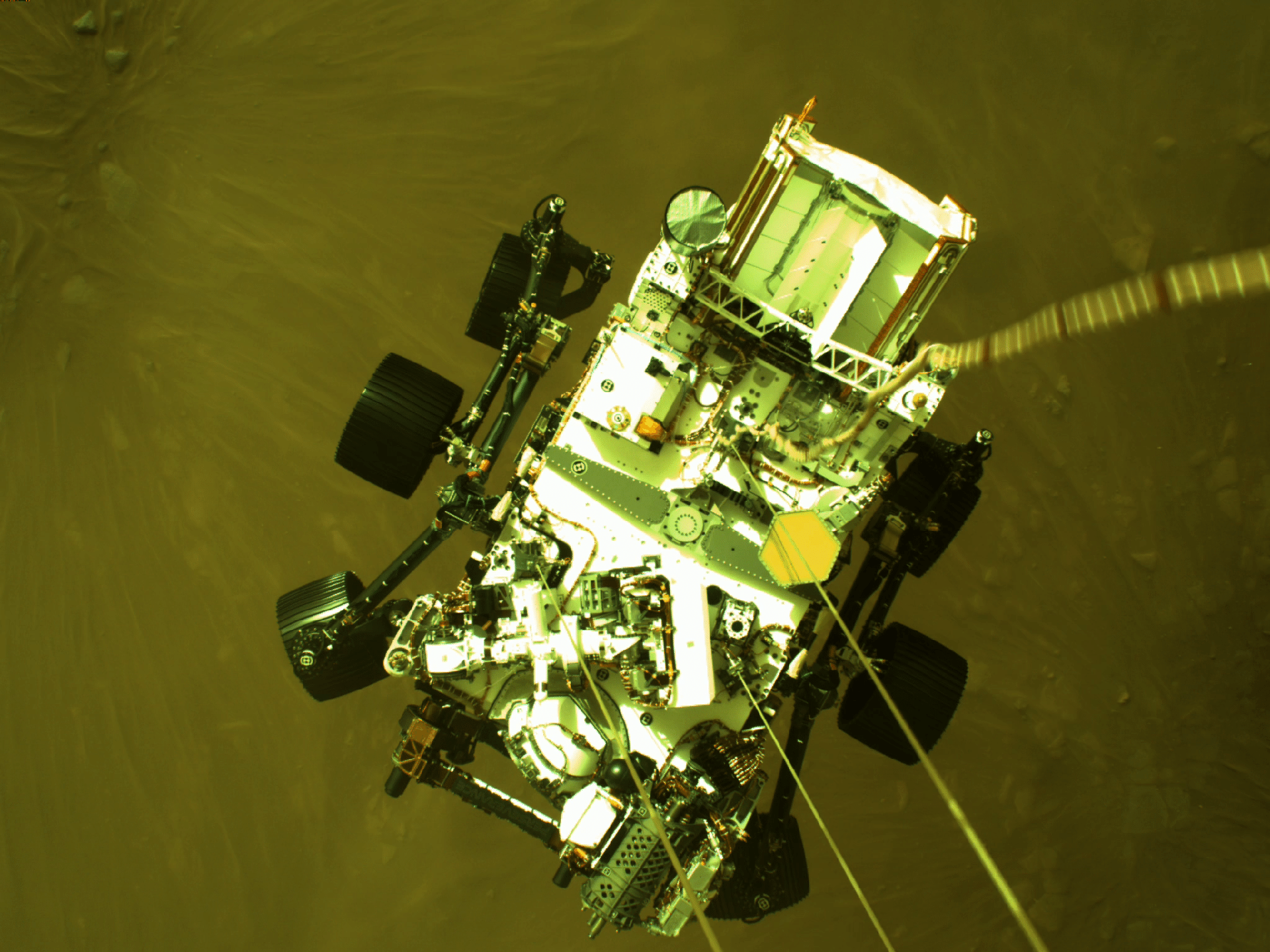
O robô chinês Zhurong, que pesa 240 quilos, chegou em Marte depois de uma viagem que durou quase um ano. O robô vai estudar o solo e a atmosfera do planeta vermelho em uma missão de três meses.
A viagem do Zhurong fez com que a China se tornasse o segundo país do mundo a alcançar a façanha de ir ao solo marciano, depois dos Estados Unidos, que também inaugurou a jornada com o robô Perseverance, que chegou em fevereiro de 2021.
O Zhurong carrega seis instrumentos, incluindo um sistema de espectroscopia a laser (para detectar elementos de superfície, minerais e tipos de rochas), leitores de imagens topográficas e multiespectrais, de campo magnético e de clima, e câmeras panorâmica.
O robô também é equipado com um radar para penetração no solo —algo que é novidade em Marte.




















ID: {{comments.info.id}}
URL: {{comments.info.url}}
Ocorreu um erro ao carregar os comentários.
Por favor, tente novamente mais tarde.
{{comments.total}} Comentário
{{comments.total}} Comentários
Seja o primeiro a comentar
Essa discussão está encerrada
Não é possivel enviar novos comentários.
Essa área é exclusiva para você, , ler e comentar.
Só s do UOL podem comentar
Ainda não é ? Assine já.
Se você já é do UOL, faça seu .
O autor da mensagem, e não o UOL, é o responsável pelo comentário. Reserve um tempo para ler as Regras de Uso para comentários.